Wie ist Dewarping auf Lepton® 3.1R und Lepton UW anzuwenden?
1 Einführung
Die Infrarotlinse (IR) Lepton 3.1R und Lepton UW verwenden jeweils ein 95°-Weitwinkelobjektiv (WFOV) und ein 160°-WFOV-Objektiv. Die Trommelverzerrung wird durch das WFOV-Objektiv erzeugt, wodurch die Bildmitte etwas größer wird als die Kanten. Dadurch scheinen sich gerade Linien um den Rand des Bildes zu kurven. Trommelverzerrung ist für viele Bildgebungsanwendungen unerwünscht. Dieser Anwendungshinweis beschreibt die Anwendung von Verzerrungskorrektur (Entzerrung) auf die Ausgänge Lepton 3.1R und Lepton UW unter Verwendung der integrierten OpenCV-Funktionen.

2 Bildverzerrung
2.1 Übersicht
Eine WFOV-Linse ermöglicht es dem Imager, mehr in einer Szene zu erfassen, verursacht jedoch Verzerrungen, wodurch Objekte verformt erscheinen. Im Allgemeinen können zwei Arten von Verzerrungen in einer Kamera vorhanden sein: radial und tangential. Radiale Verzerrung liegt vor, wenn gerade Linien entweder nach innen oder nach außen von der Mitte kurven, während tangentiale Verzerrung dann vorliegt, wenn das Objektiv in Bezug auf die Bildebene geneigt ist und das Bild verzerrt erscheint. Zur Behebung von Linsenverzerrungen kalibrieren Sie die Kamera, um die Transformationsmatrizen zu berechnen, die die Zuordnung der Kamera zur Bildebene korrigieren.
ABBILDUNG 1. RADIALE VERZERRUNG (LINKS) UND TANGENTIALE VERZERRUNG (RECHTS)
Das Kalibrierverfahren variiert leicht mathematisch zwischen Lepton 3.1R und Lepton UW. Sie haben unterschiedliche Gläser, sodass sie nicht die gleiche Art geometrischer Verzerrung darstellen. Obwohl beide radial verzerrt zu sein scheinen, bestehen Lepton 3.1R-Bilder aus linearen Rändern, während Lepton UW kreisförmige Ränder aufweist, die allgemein als Fischaugeneffekt bekannt sind. Das Zuordnen von Szeneninhalten in gerade Linien für den Lepton UW ist aufgrund der extrem verzerrten Grenzen komplexer. Für die Kalibrierung werden verschiedene Verzerrungsmodelle entsprechend dem Linsentyp integriert, um diese Unterscheidung zu kompensieren: ein Weitwinkel-, geradliniges Verzerrungsmodell für Lepton 3.1R und ein Fischaugen-Verzerrungsmodell für Lepton UW.
2.2 Anwendung der Entzerrungstransformation
Zur Korrektur von Linsenverzerrungen mit der OpenCV-Methode werden Kameras kalibriert, indem Testmuster erfasst werden, um die Verzerrung zu modellieren. Das Erfassen von Kalibrierungsmustern mit einer IR-Kamera ist eine Herausforderung, daher wird die Verwendung der Standardmatrizen empfohlen, die die Kameraverzerrung unten charakterisieren. Eine kurze Anleitung zur Erfassung des Kalibrierungsmusters ist in Abschnitt 2.3 beschrieben.
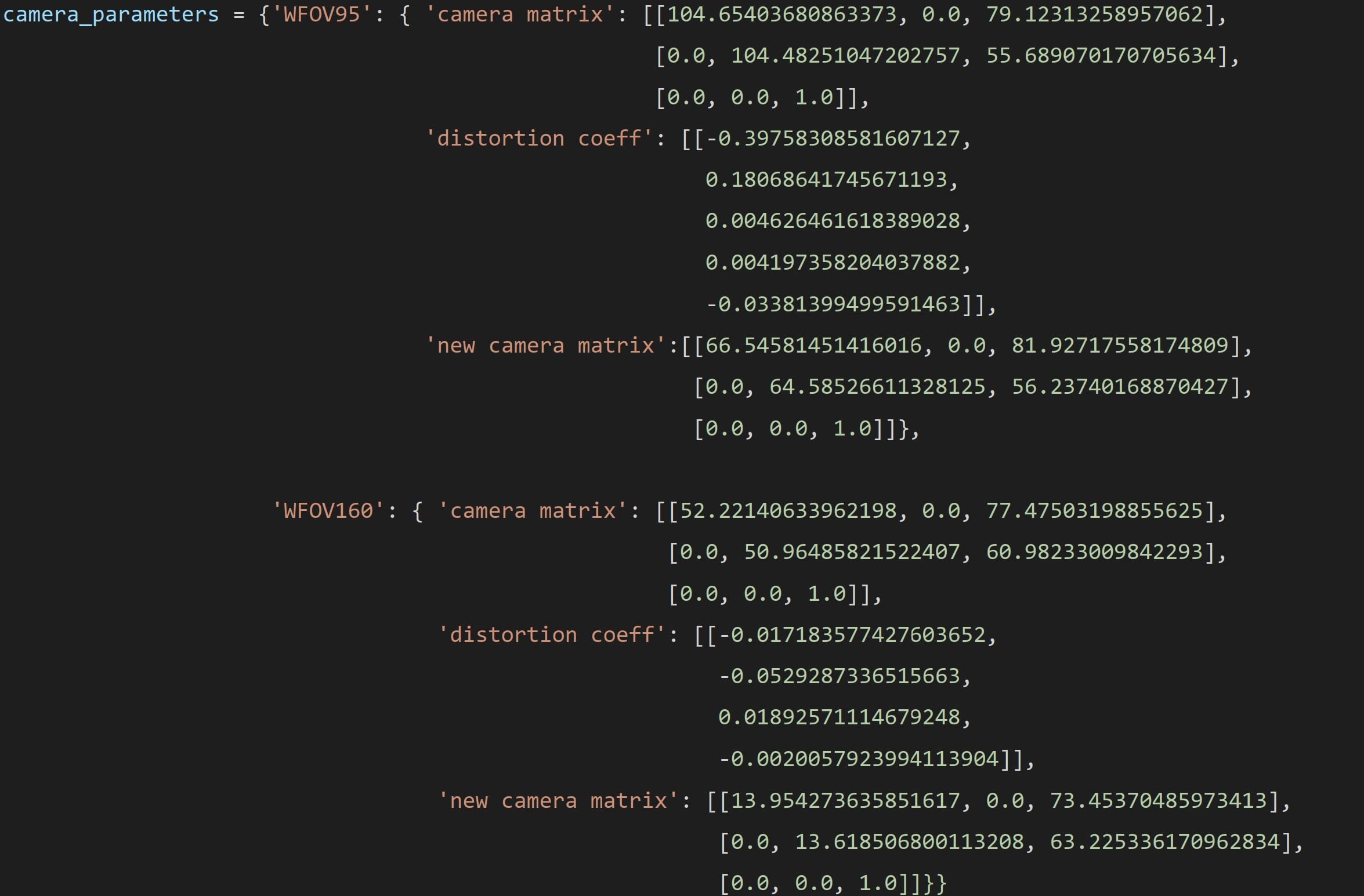
ABBILDUNG 2. KAMERAMATRISCHE
Diese Matrizen werden zusammen mit dem Eingabebild als Argumentbild in die folgende integrierte OpenCV-Funktion übertragen, um die Zuordnung der Kamera-zu-Bild-Ebene zu korrigieren. Ein Beispielcode in Python zur Demonstration ist in Abschnitt 2.4 enthalten.
Lepton 3.1R:
Lepton UW:

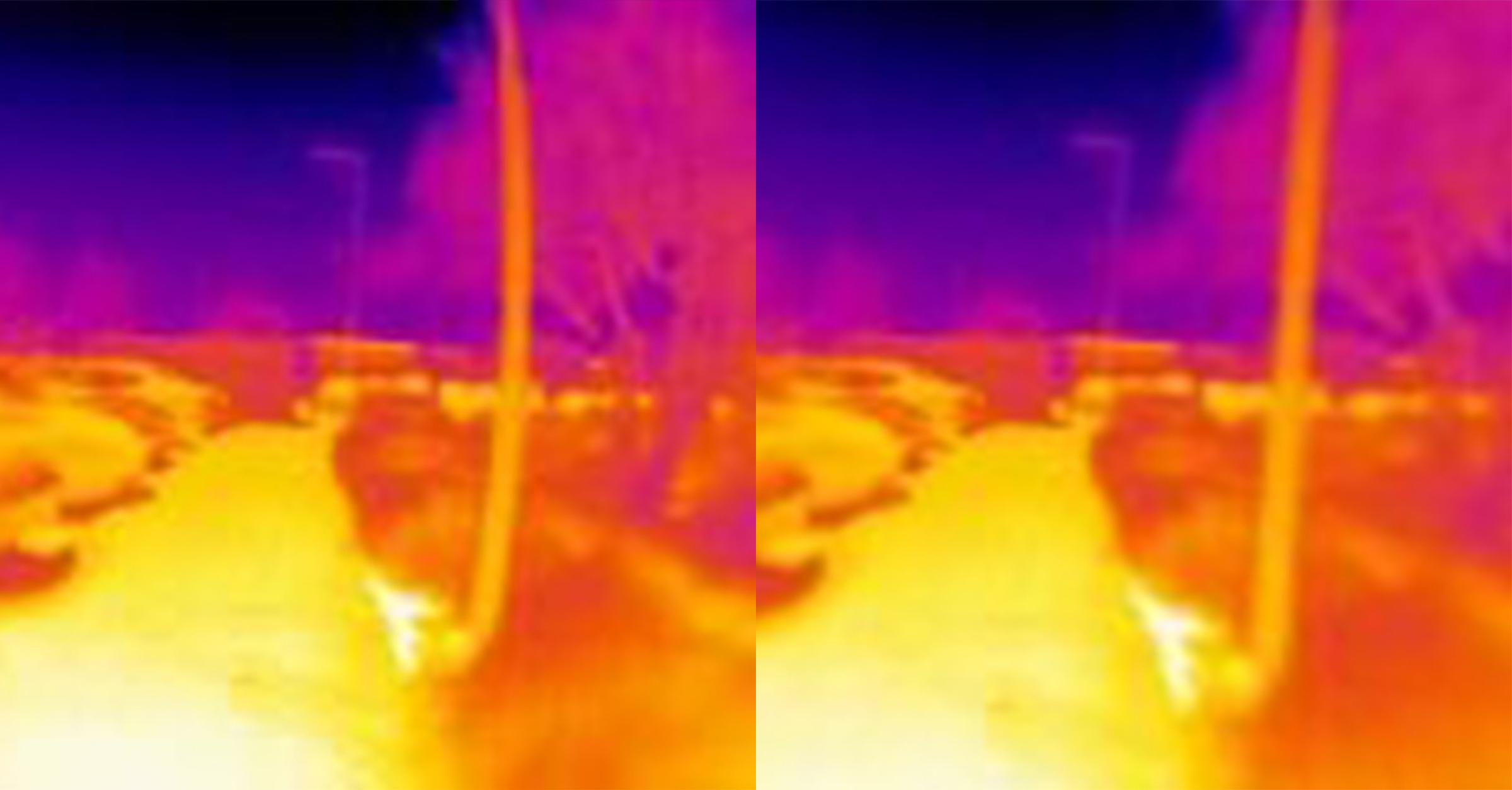
Beachten Sie, dass es eine Kameramatrix und eine neue Kameramatrix gibt. Beide stellen intrinsische Kameraparameter dar; der einzige Unterschied besteht darin, dass die Kameramatrix die ursprünglichen intrinsischen Kameraparameter definiert, während die neue Kameramatrix die ursprüngliche Kameramatrix skaliert und verschiebt. Ohne die neue Kameramatrix in der Funktion „Unistort“ anzugeben, verwendet sie standardmäßig die Kameramatrix, die ein geradliniges Bild mit demselben IFOV wie seine Eingabe ausgibt. Der Nachteil für das Erhalten gerader Linien ist, dass einige Pixel in den Ecken des Eingabebildes verloren gehen. Das Anwenden der oben gezeigten neuen Kameramatrix für alle Pixel bietet die Möglichkeit, alle Pixel von der Eingabe zu behalten, führt jedoch schwarze Pixel um die Ränder ein. Abbildung 3 und 4 zeigen den Probeneingang und die möglichen Ausgänge.
![]()
ABBILDUNG 3. LEPTON 3.1R - ORIGINAL (LINKS), GERADLINIGER AUSGANG (MITTE) UND ALLE PIXEL-VERSIONSAUSGANG (RECHTS)


![]()
ABBILDUNG 4. LEPTON UW - ORIGINAL (LINKS), GERADLINIGER AUSGANG (MITTE) UND ALLE PIXEL-VERSIONSAUSGANG (RECHTS)
2.3 Kalibrierung der Kamera
Da die OpenCV-Website eine gründliche Erklärung und einen Beispielanwendungscode des Kalibrierungsprozesses liefert, deckt dieser Anwendungshinweis die Details nicht ab. Die Dokumentation finden Sie unter https://docs.opencv.org/3.4/d4/d94/tutorial_camera_calibration.html.
Wie in Abschnitt 2.2 erläutert, ist die Erfassung von Kalibrierungsmustern in IR nicht einfach. Bitte folgen Sie dem nachstehenden Leitfaden, um effektive Aufnahmen für die Kalibrierung der IR-Kamera zu machen.
1. Einrichten
- Verwenden Sie ein Kreisgitter-Kalibrierungsmuster, da es nicht ideal ist, ein thermisches Schachbrett anzuzeigen. Asymmetrische oder symmetrische Kreisgitter funktionieren.
- Es wird ein 8x8-Kreisraster empfohlen.
- Ein Papierausdruck des Kalibrierungsmusters, das auf Karton geklebt und kurz mit Lichtern mit hoher Energieleistung beleuchtet ist, oder die Sonne kann thermischen Kontrast erzeugen.
2. Die Aufnahmen machen
- Mindestens ein 6x6-Kreisraster für Lepton 3.1R und ein 4x4-Kreisraster für Lepton UW in der Aufnahme sichtbar haben.
- Einige Kreise können aufgrund des WFOV in der Nähe der Bildgrenzen verschwommen sein.
- Jede Erfassung des Kreisgitters sollte nur Teile des FOV belegen.
- Die Sammlung von Aufnahmen sollte die meisten Bereiche des Sichtfelds umfassen, d. h. ein oder zwei Aufnahmen des Kreisgitters in der Nähe der Mitte und acht bis zehn Aufnahmen um den Rand des Sichtfelds.
- Zehn bis zwölf Gesamtaufnahmen bieten eine optimierte Kalibrierung, und zusätzliche Aufnahmen sind nicht vorteilhaft.
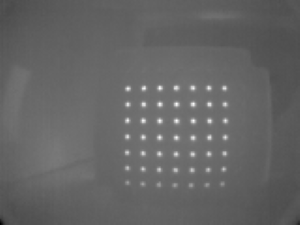
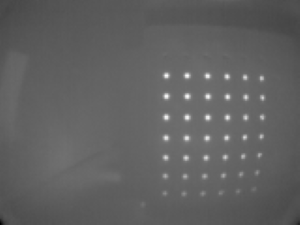

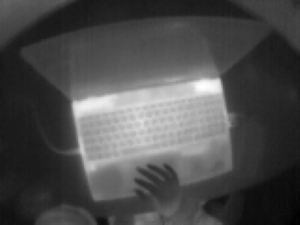
ABBILDUNG 5. MITTE (LINKS), UNTEN RECHTS (MITTE) UND UNTEN MITTIG (RECHTS) BEISPIEL LEPTON 3.1R KALIBRIERUNGSMUSTER ERFASST
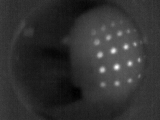
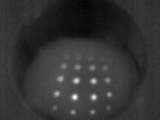
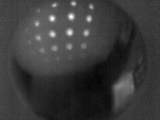
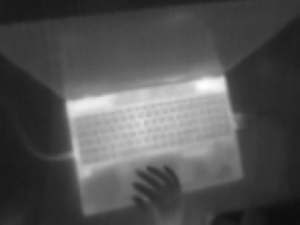
ABBILDUNG 6. MITTE (LINKS), UNTEN RECHTS (MITTE) UND UNTEN MITTE (RECHTS) BEISPIEL FÜR LEPTON UW-KALIBRIERUNGSMUSTERERFASSUNGEN
2.4 Unterstützung
Beispielskript Lepton_Dewarp_example.py1 kann hier heruntergeladen werden.
Technische Unterstützung finden Sie im FLIR Support Center unter http://support.flir.com.
